Instruction Decoder, instruction registerindeki komutu çözüp buna göre işlemci içindeki modülleri konfigüre edip komutun yürütülmesini sağlar. Kontrol edilen sinyallerin açıklamaları için önceki yazılara bakılabilir. Tasarımın VHDL kodu aşağıdadır.
library IEEE; use IEEE.STD_LOGIC_1164.ALL; entity Instruction_Decoder is port(Instruction_In : in std_logic_vector(15 downto 0); --Komut girişi Flags_In : in std_logic_vector(1 downto 0); --Bayrak girişleri --Register kontrol çıkışları Enable : out std_logic; Rn, Rm : out std_logic_vector(2 downto 0); Rd : out std_logic_vector(2 downto 0); --ALU kontrol çıkışları ALU_Operations : out std_logic; Arithmetical_Operations : out std_logic_vector(1 downto 0); Logic_Operations : out std_logic_vector(1 downto 0); Flags_Update : out std_logic; --PC kontrol çıkışları Branch : out std_logic_vector(1 downto 0); --Veri yolu kontrol çıkışları ALU_Mux : out std_logic; ALU_Zero_Mux : out std_logic; Return_Mux : out std_logic; --Diğer kontrol çıkışları R_W : out std_logic; Bus_Active : out std_logic; Im_Data_Out : out std_logic_vector(7 downto 0)); end Instruction_Decoder; architecture Behavioral of Instruction_Decoder is begin --Her bir komut için kontrol çıkışları tek tek ayarlanır. process(Instruction_In) begin --MOV if Instruction_In(15) = '0' then Rd <= Instruction_In(13 downto 11); Rm <= Instruction_In(6 downto 4); Im_Data_Out <= Instruction_In(10 downto 3); Enable <= '1'; ALU_Mux <= Instruction_In(14); ALU_Zero_Mux <= '1'; ALU_Operations <= '0'; Arithmetical_Operations <= "00"; Return_Mux <= '0'; Flags_Update <= '0'; R_W <= '0'; Bus_Active <= '0'; Branch <= "00"; --MOV --ADD, ADC, SUB elsif Instruction_In(15 downto 14) = "10" then Rd <= Instruction_In(10 downto 8); Rn <= Instruction_In(7 downto 5); Rm <= Instruction_In(4 downto 2); Im_Data_Out <= "000" & Instruction_In(4 downto 0); Enable <= '1'; ALU_Mux <= Instruction_In(13); ALU_Zero_Mux <= '0'; ALU_Operations <= '0'; Arithmetical_Operations <= Instruction_In(12 downto 11); Return_Mux <= '0'; Flags_Update <= '1'; R_W <= '0'; Bus_Active <= '0'; Branch <= "00"; --ADD, ADC, SUB --AND, OR, NOT elsif Instruction_In(15 downto 13) = "110" then Rd <= Instruction_In(9 downto 7); Rn <= Instruction_In(6 downto 4); Rm <= Instruction_In(3 downto 1); Im_Data_Out <= "0000" & Instruction_In(3 downto 0); Enable <= '1'; ALU_Mux <= Instruction_In(12); ALU_Zero_Mux <= '0'; ALU_Operations <= '1'; Logic_Operations <= Instruction_In(11 downto 10); Return_Mux <= '0'; Flags_Update <= '1'; R_W <= '0'; Bus_Active <= '0'; Branch <= "00"; --AND, OR, NOT --CMP, CMN elsif Instruction_In(15 downto 12) = "1110" then Rn <= Instruction_In(9 downto 7); Rm <= Instruction_In(6 downto 4); Im_Data_Out <= "0" & Instruction_In(6 downto 0); Enable <= '0'; ALU_Mux <= Instruction_In(11); ALU_Zero_Mux <= '0'; ALU_Operations <= '0'; Arithmetical_Operations <= (not Instruction_In(10)) & '0'; Flags_Update <= '1'; R_W <= '0'; Bus_Active <= '0'; Branch <= "00"; --CMP, CMN --LDR, STR elsif Instruction_In(15 downto 11) = "11110" then Rn <= Instruction_In(6 downto 4); Rm <= Instruction_In(9 downto 7); Rd <= Instruction_In(9 downto 7); Im_Data_Out <= "0000" & Instruction_In(3 downto 0); Enable <= Instruction_In(10); ALU_Mux <= '1'; ALU_Zero_Mux <= '0'; ALU_Operations <= '0'; Arithmetical_Operations <= "00"; Return_Mux <= '1'; Flags_Update <= '0'; R_W <= Instruction_In(10); Bus_Active <= '1'; Branch <= "00"; --LDR, STR --B elsif Instruction_In(15 downto 10) = "111110" then Im_Data_Out <= Instruction_In(7 downto 0); Enable <= '0'; Flags_Update <= '0'; R_W <= '0'; Bus_Active <= '0'; Branch <= '0' & (((not Instruction_In(8)) and (not Instruction_In(9))) or (Instruction_In(8) and Flags_In(1)) or (Instruction_In(9) and (not Flags_In(1)))); --B end if; end process; end Behavioral;
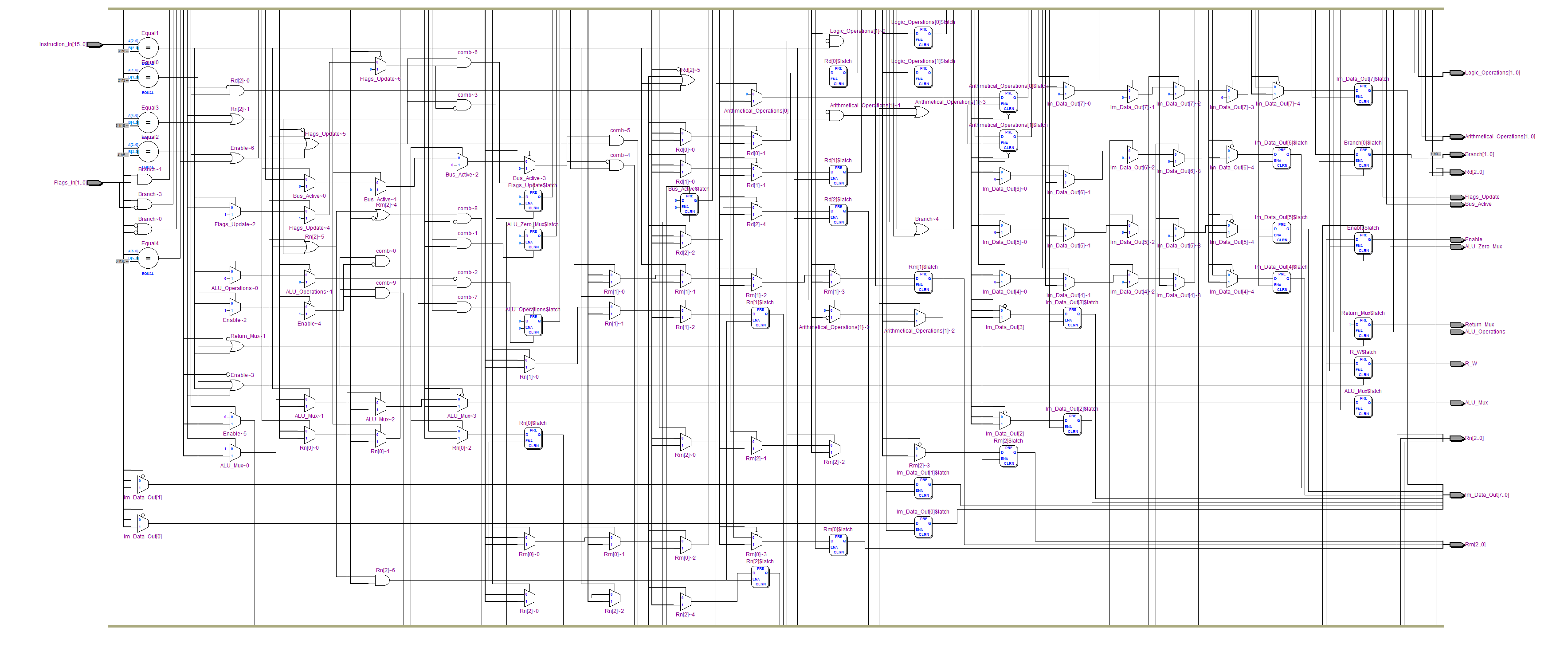
Quartus II programının oluşturduğu RTL şeması: